次世代自動車向け“CASE”ソリューション
ゼンリンは高精度な地図データ上に信号や歩行者、対向車など動的情報をダイナミックに反映することにより、3次元時空間情報を提供します。
CASEの未来を支えるために
ゼンリンは、道路標識や車線幅等の情報を含む高精度空間データベースに、IoTデバイスから収集した ビッグデータを分析・解析して組み合わせた3次元時空間情報を生成し、“CASE”の未来を拓きます。
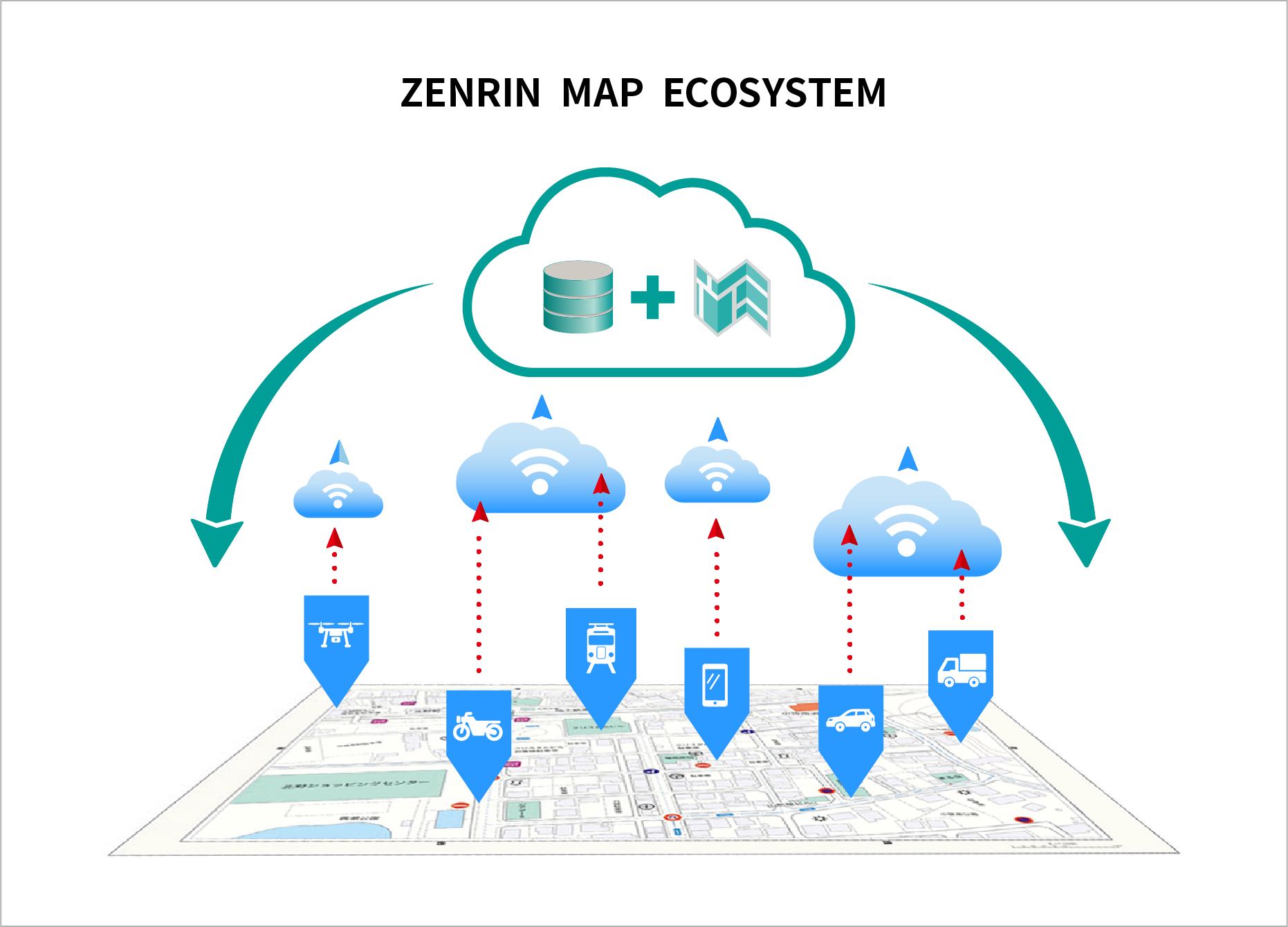
ゼンリンの循環型プラットフォーム
多様なデータを融合して路上の事象を動的に地図上に反映する
ゼンリンは、全国を網羅する高精度な住宅・道路地図と、道路標識等を含む高精度空間データベース、車両から得られるプローブデータを連携させて、高精度な3次元時空間情報をリアルタイムで生成し、現実世界の事象を可視化する情報の循環型プラットフォーム「ZENRIN MAP ECOSYSTEM」の実現を目指しています。この次世代インフラに、Mobility Technologies社のドライブレコーダーから収集した映像データを解析してデータ化する技術を組み合わせることで“CASE”の社会実装を支援します。
ソリューション
ダイナミックな時空間情報の提供により“CASE”を基盤とする安全で快適な走行を支援します。




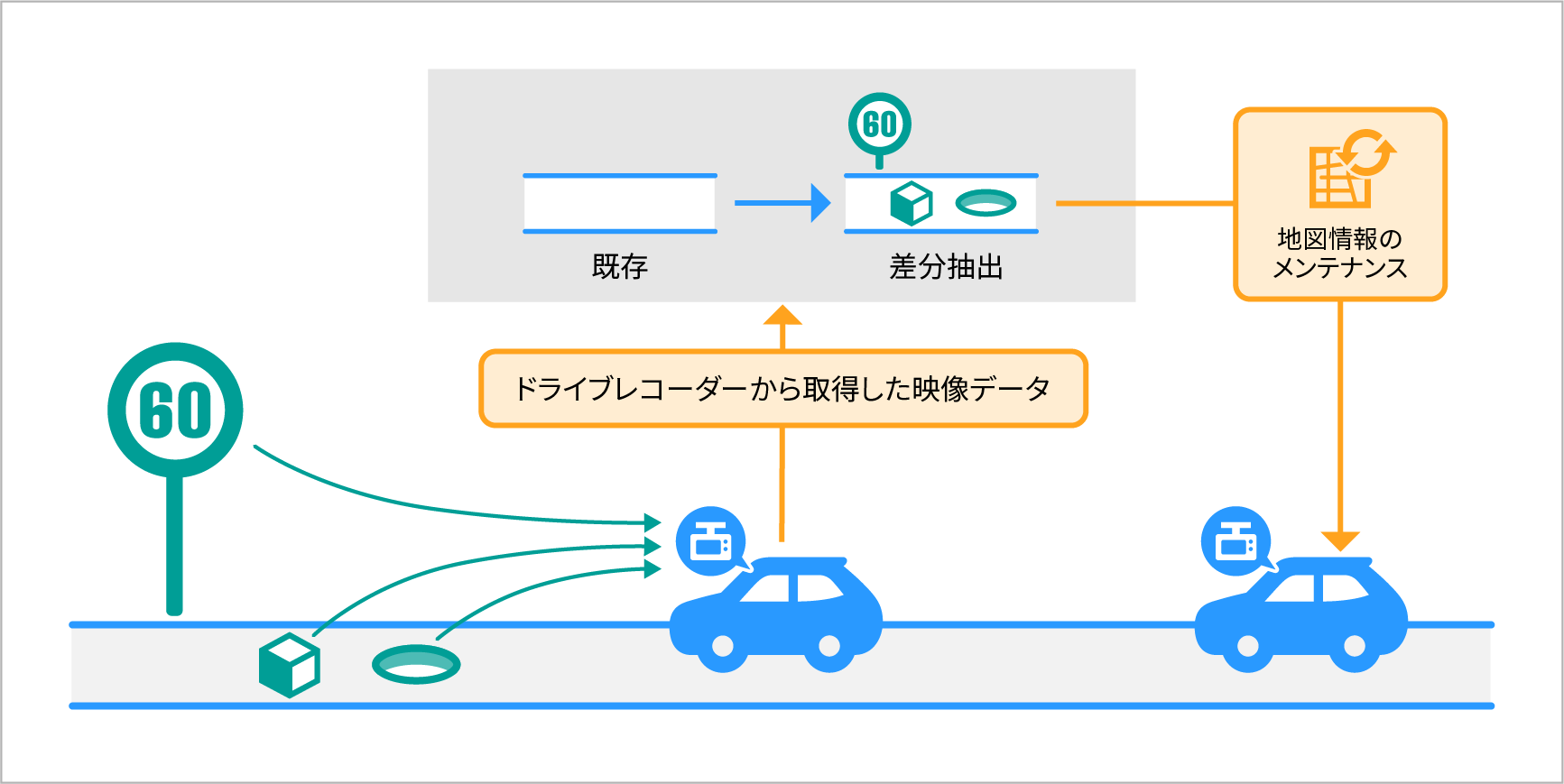
走行中の道路の異変を事前に
地図へ反映し安全走行を支援
Connected(コネクテッド)
各地を走行するタクシーやトラックのドライブレコーダー映像が自動的にゼンリンクラウドへアップロードされ、AIが既存の地図データと比較分析を行い、建設・工事の情報や、新設された交通標識、路面ペイント、信号機等の差分情報を自動抽出し、該当地域を走行する車両へフィードバックされます。該当地域を走行するドライバーは、事前に工事や路上駐車などの異変を早期に察知できるので、安全に走行することができます。
鮮度の高い3次元時空間情報を
AD/ADASに配信
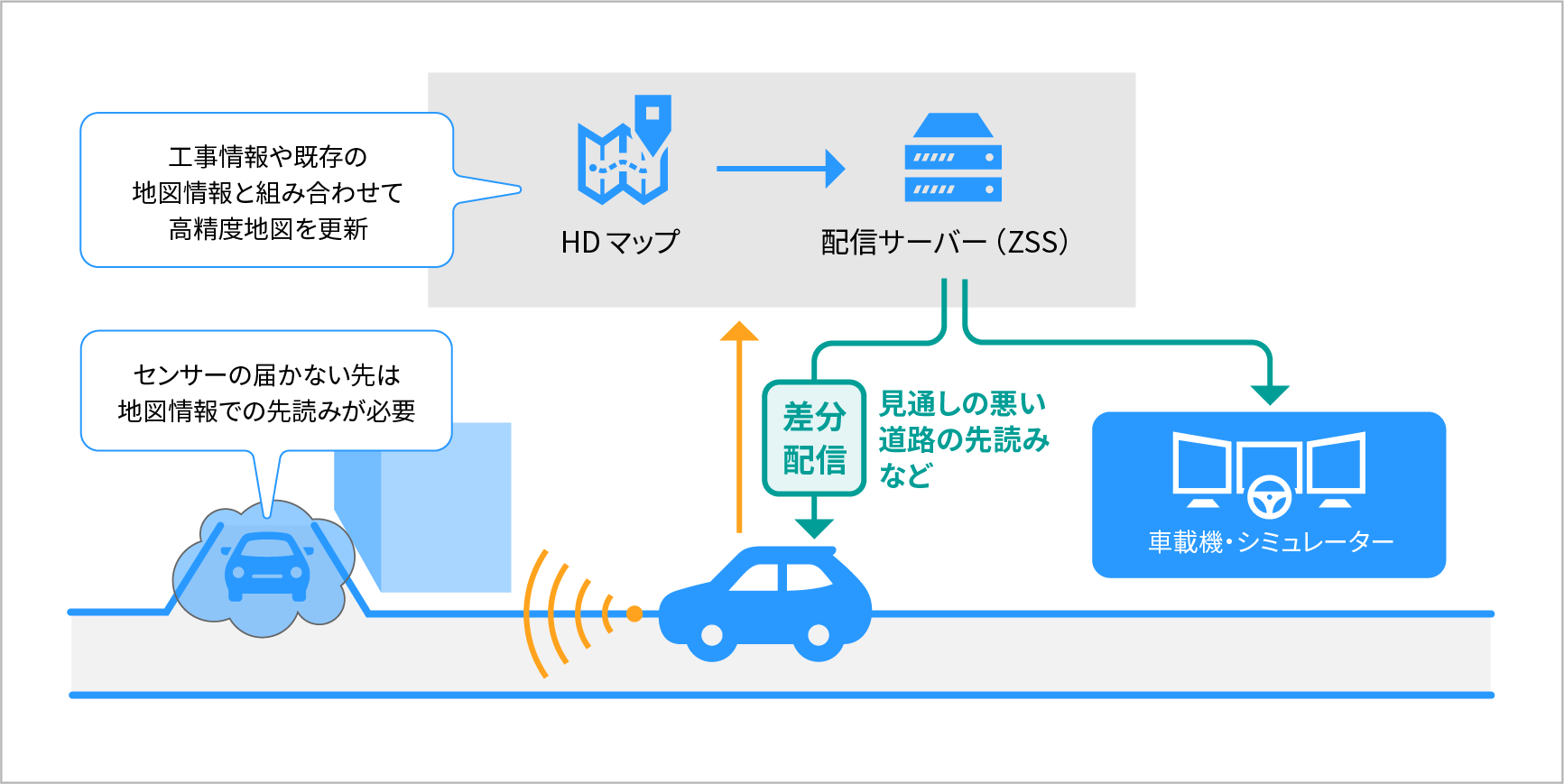
Autonomous(自動運転)
車両センサーやドライブレコーダー映像などを解析し、既存地図との差分を算出し、工事情報などの信頼度フラグと合わせて、ゼンリンクラウド上のZSSサーバーが車載器やシミュレータが利用できるデータに変換して配信することで、AD(自動運転)/ADAS(先進運転支援システム)に鮮度の高い3次元時空間情報を提供します。現在、走行中の異変や変化をリアルタイムで反映するダイナミックマップの開発も進められています。
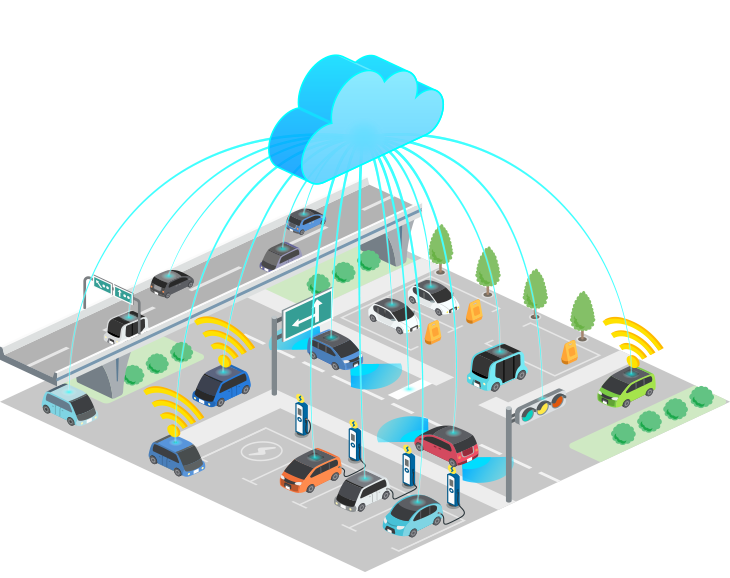
走行車両の現在地を可視化し
カーシェアリングを進化
Shared(シェアリング)
利用者の現在地と、カーナビと連動したシェアリングカーのプローブ情報を、それぞれのレイヤー上に示して1つの地図として可視化することで、交通結節点までの効率的な移動を支援します。また、昼夜人口などのGIS要素と駐車場の満車空車情報を紐づけることで効率的なカーシェアリング事業をサポートします。さらに車々間通信や路車間通信に基づく絶対位置測位による高精度な走行管理が可能な基盤地図の開発にも取り組んでいます。

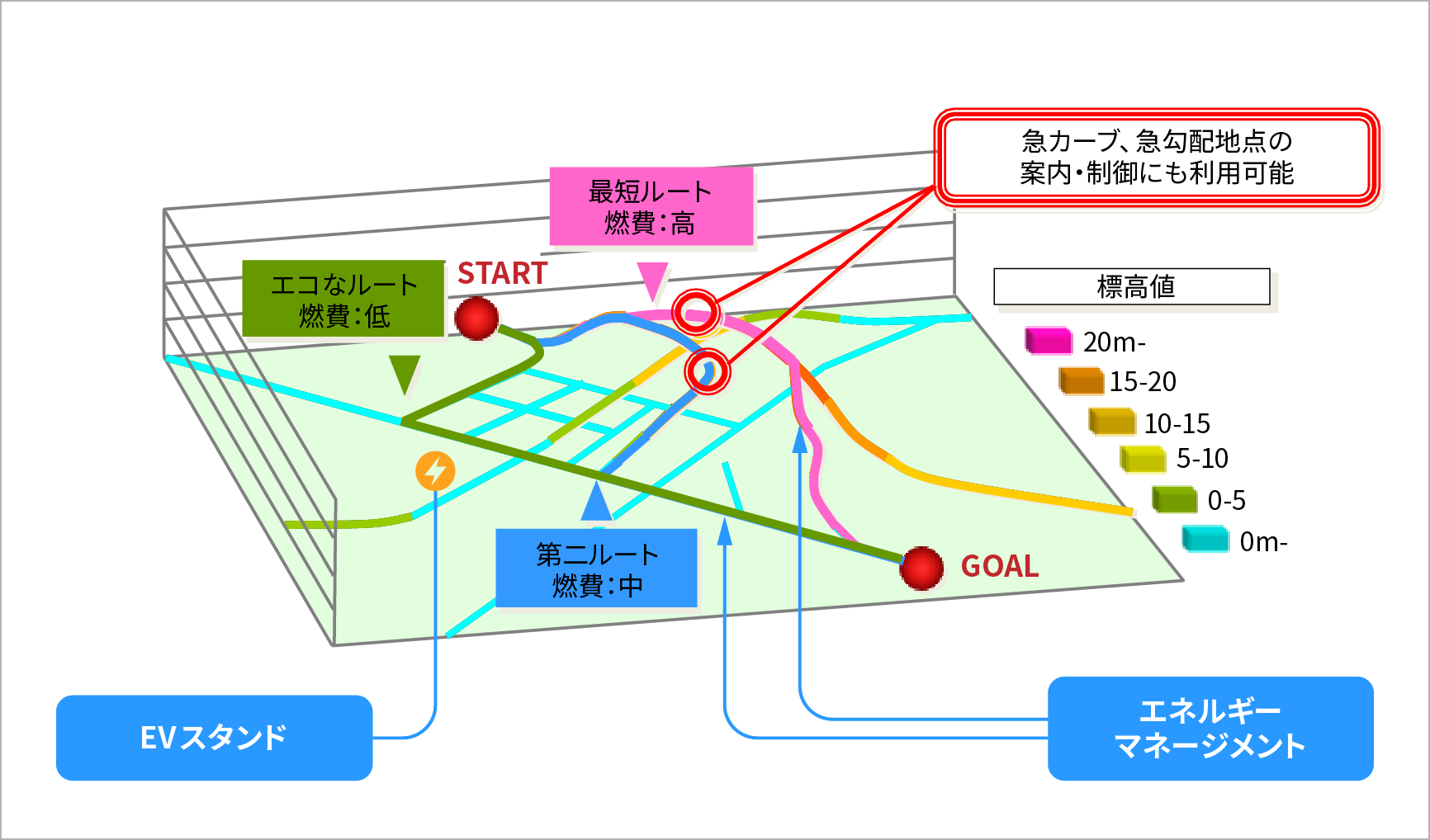
標高や勾配、電力消費まで考慮し
EVに最適なルートを作成
Electric(電動化)
車両に搭載されたエネルギーマネジメントシステムのデータだけではなく、走行ルート上の全道路標識、標高と勾配、曲率ごとのギアチェンジ頻度、充電POI、充電器側のエネルギーマネジメントや混雑状況などを元に詳細なエネルギー消費量を算出し、EVに最適化したルートを作成します。走行時のデータも随時計測し、残りの標高情報等をもとに航続距離を割り出し、必要なタイミングで給電を促すメッセージを流します。