

自動運転/ADASへの期待
20世紀に本格的に始まったモータリゼーションは、社会や暮らしに大きな変化をもたらす一方で、交通事故や渋滞といった負の側面ももたらしました。こうした課題を解決するテクノロジーとして期待されているのが自動運転/ADASです。ADASは、クルマの安全性を高め、渋滞を緩和につながります。自動運転は、バスやタクシーの運転手や宅配業務のドライバーなどの人手不足の解消に貢献することでしょう。
例えば、バスは決められたルートを時刻表どおり運行するのではなく、バスを利用したい人たちの現在地や目的地に応じてフレキシブルに運行する新しいタイプの公共交通も実現可能になります。また、マイカーはただの移動手段ではなく、家族や友人たちで時間と空間を共有するエンターテインメントの"場"に様変わりします。技術の進化にともなって自動運転/ADASは、社会と私たちに、全く新しい体験をもたらすことでしょう。

自動運転/ADASを支える高精度地図
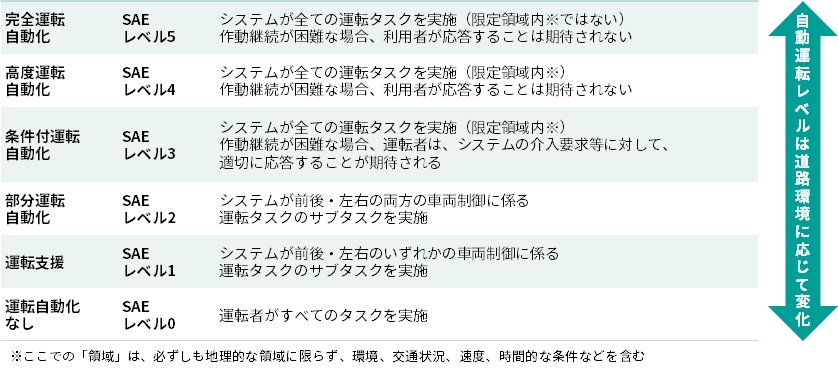
自動運転/ADASの実現に向けて、政府は、ドライバーがまったく運転に関知しない完全自動運転に至るまでの段階を5つのレベルに分類しています。レベル1、2においては、アクセルやブレーキ、ハンドルなどを操作するためのセンサー技術や制御技術が大きなポイントとなりますが、より高度なレベル3~5においては、地図情報に加え、道路状況、気象情報を統合し、リアルタイムでシステムに伝えることが、安全運転のカギを握ることになります。
こうしたさまざまな情報を統合化した地図情報は「ダイナミックマップ」と呼ばれ、自動運転の実現に欠かせないことから、わが国では内閣府が主導し、官民が連携してその構築に取り組んでいます。
ゼンリンの取り組み
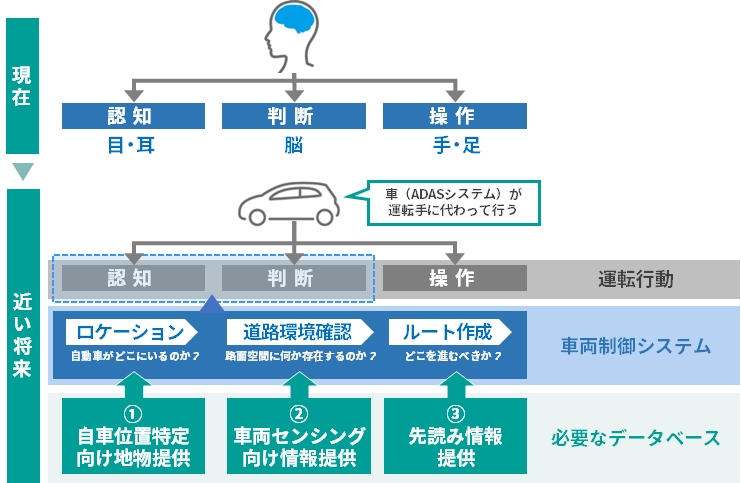
ダイナミックマップの基盤のひとつとして期待されているのが、ゼンリンの高精度空間データです。自動運転/ADASにおけるシステムのうち、クルマがいまどこにいるのか、走行中の路面空間に何があるのかという「認知」、どこをどう進むべきかという「判断」の2つのステップを支えています。
高度安全運転支援・自動運転の実現に向け2つの役割に対するデータベースを提案
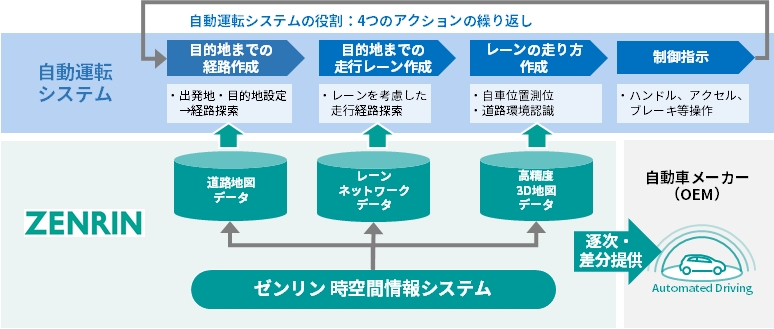
ゼンリンでは、時空間情報システムを活用して時空間データベースから高精度空間データを切り出し、ダイナミックマップの基本情報として提供していきます。
自動運転に寄与する2つのコンテンツを時空間情報システムから生成し、逐次・差分で提供
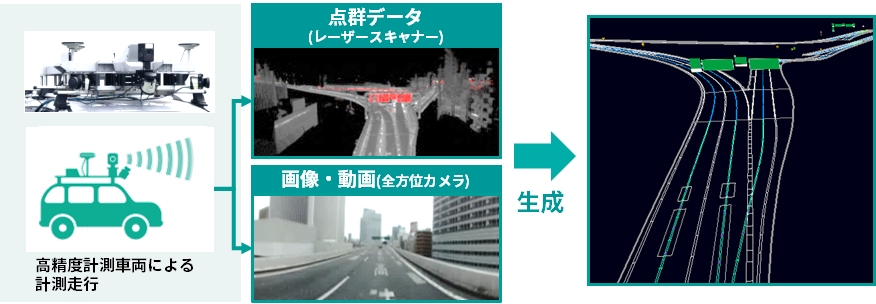
高精度空間データの開発
また、ダイナミックマップはグローバルでの共通化が必要不可欠であり、世界基準の標準化への取り組みにおいても、ゼンリンは積極的な役割を果たしていこうとしています。
ゼンリンは自動運転/ADASの実現に向けた基盤整備に貢献していきます。
保有する特許権
国内
特許4700383
特許6262618
特許6307580
特許6307581
特許6370765
特許6378288
特許6386300
特許6386517
特許6412029
特許6423212
特許6441616
特許6453586
特許6469066
特許6494729
特許6505199
特許6541996
特許6663959
特許6664441
特許6692625
特許6712447
特許6734668
特許6741436
特許6760743
特許6785180
特許6801987
特許6835499
米国
US9650050
US9650055
US10126751
US10160461
